Understanding QEMU [L2.01]
本节内容主要包含:QEMU基本组件
本节QEMU源代码版本: qemu-10.0.3。涉及到的代码文件如下所示
main.c,system.h,runstate.c,main-loop.c,vl.c
参考文献:
《QEMU/KVM源码解析与应用》
@last_update: 2025/09/10
"Everying is a file"
QEMU事件循环机制
在上一节的末尾,其实出现了包括kvm_fd,vm_fd,vcpu_fd在内的各种fd。”一切皆文件“是UNIX/Linux的著名哲学理念。Linux具体文件、设备、网络socket等都可以抽象为文件。内核通过虚拟文件系统VFS抽象出一个统一的界面。Linux通过fd(文件描述符)来访问一个文件,application可以调用select \ poll \ epoll系统调用监听文件变化。
QEMU程序的运行也基于各类文件fd事件,在运行过程中将感兴趣的文件fd添加到监听列表上并定义相应的处理函数。在QEMU主线程中,有一个循环用来处理这些文件fd的事件(如用户的输入、来自VNC的连接,vNIC对应tap设备的收包...)
为什么需要事件循环?
QEMU 本质上是一个用户态的虚拟机监控器(VMM),除了 vCPU 执行指令,还需要处理:
虚拟设备的 I/O 请求(磁盘、网卡、串口等)
定时器回调(比如虚拟时钟、硬件超时)
文件描述符事件(tap 接口、socket 通信)
管理命令(QMP/QEMU Monitor Protocol)
VM 的生命周期事件(挂起、恢复、迁移)
这些事件都是异步发生的,因此 QEMU 需要一个 事件循环机制 来统一管理。
glib事件循环机制
QEMU的事件循环机制基于glib (跨平台,C编写的库)。或者说QEMU 的事件循环是基于 glib 提供的抽象,但 QEMU 自己实现了一个轻量级的循环框架。
glib 的 事件循环机制(GMainLoop / GMainContext) 是 QEMU、GTK 等很多项目的基础。它本质上是一个 多路事件分发器,统一处理文件描述符、定时器、空闲任务等事件。
基本概念
glib 提供了一个 可移植的事件循环框架,类似于
select/poll/epoll的封装。核心目标:统一处理 I/O 事件、定时器事件、idle 回调 等。
主要对象有两个:
GMainContext:事件循环的上下文,负责保存事件源和调度逻辑。
GMainLoop:基于 GMainContext 封装的一个循环对象,提供开始/停止循环的 API。
事件源(GSource)
所有事件都抽象为 GSource:
I/O Source:文件描述符可读/可写(基于
GPollFD)Timeout Source:定时器,某个时间点触发
Idle Source:CPU 空闲时执行
Custom Source:用户自定义事件源
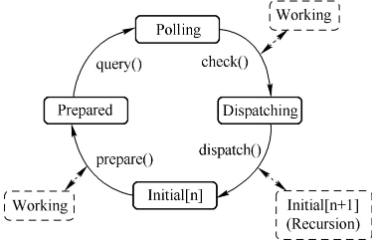
每个 GSource 有三个函数:
prepare():检查是否准备好触发事件check():检测事件是否真的发生dispatch():事件回调执行其实还有别的,比如query : 用于获取实际需要调用poll的文件
事件源可以有不同优先级,事件循环通常先处理高优先级事件源
工作流程
glib 的事件循环本质上是不断执行以下步骤:
xxxxxxxxxxwhile (g_main_loop_is_running(loop)) {// 1. 找到所有活跃的 source,准备事件g_main_context_prepare(context, &max_priority);// 2. 计算超时时间,调用 poll/epoll/kqueue 等等待事件g_main_context_poll(context, timeout, fds);// 3. 检查哪些 source 触发g_main_context_check(context, max_priority, fds);// 4. 分发事件回调g_main_context_dispatch(context);}流程说明:
prepare:看哪些 source 可能即将触发(例如超时器快到期)。
poll:阻塞等待 I/O 事件或超时。
check:确认哪些事件真正发生。
dispatch:调用对应的回调函数。
这就是glib事件循环机制的处理流程,应用程序需要做的就是把新的事件源加入到这个处理流程中,glib会负责处理事件源上注册的各种事件。
补充问题
Q: 什么是Poll ?
狭义的poll
在 Linux/Unix 系统里,poll 是一个系统调用,用来等待 一个或多个文件描述符(fd) 的事件发生(比如可读、可写、异常)。
xxxxxxxxxxint poll(struct pollfd *fds, nfds_t nfds, int timeout);
fds:要监听的文件描述符数组,每个 fd 可以指定关心的事件(可读、可写等)。
nfds:数组长度。
timeout:超时时间(毫秒),-1表示无限等待。返回值
大于 0 :有事件发生
等于 0 :超时
小于 0 :出错
比如:
xxxxxxxxxxstruct pollfd fds[2];fds[0].fd = sockfd;fds[0].events = POLLIN; // 关心是否可读fds[1].fd = timerfd;fds[1].events = POLLIN; // 关心定时器是否到期int ret = poll(fds, 2, 1000); // 等待 1 秒if (ret > 0) {if (fds[0].revents & POLLIN) {printf("socket 有数据\n");}if (fds[1].revents & POLLIN) {printf("定时器到期\n");}}这样就能在一个阻塞点同时等待多个事件。
广义的poll
在很多事件循环文档里,poll 被泛指为 等待事件 的阶段,不一定非得是
poll()系统调用,也可能是:
select()
epoll_wait()(Linux 更高效)
kqueue()(BSD / macOS)
IOCP(Windows)glib 事件循环里的 poll 阶段 就是:主循环根据所有 GSource 的需要,收集 fd 和超时时间 → 调用
poll()或epoll_wait()→ 等待事件发生或定时器超时。一句话解释:“poll”就是 挂起当前线程,等待一组事件(I/O、定时器等)发生 的机制;在事件循环中,poll 阶段就是负责阻塞直到事件准备好,然后再进入 dispatch 阶段。dispatch可以调用事件源对应事件的处理函数。
QEMU中的事件循环
背景知识:tap设备
Q: 什么是tap设备
TAP 设备是 Linux 内核里提供的一种虚拟网络设备,用于用户态程序和内核网络协议栈之间传递数据,常用于虚拟化(QEMU/KVM、容器)和网络仿真。
一句话理解:TAP 就像一根虚拟网线,一端插在虚拟机(通过 QEMU),另一端插在宿主机内核的网络栈,从而让虚拟机能像真实主机一样收发以太网数据。
Linux 里有两种虚拟网络设备:
TUN (network TUNnel)
面向 三层(L3,IP 层),收发的是 IP 包。
常用于 VPN、隧道协议(比如 OpenVPN)。
TAP (network tap)
面向 二层(L2,以太网层),收发的是 以太网帧。
常用于虚拟机、容器虚拟网卡,因为虚拟机需要完整的以太网接口。
TAP 设备在内核里表现为一个 虚拟网卡(比如
tap0),但是它不直接连到物理网卡,而是:
一端在 内核网络栈(表现得像 eth0 一样,可以配置 IP、MAC 地址)。
一端通过 字符设备文件
/dev/net/tun暴露给用户空间程序。用户空间程序(比如 QEMU、OpenVPN)可以:
通过
read()从 TAP 设备拿到 虚拟网卡收到的以太网帧;通过
write()把 以太网帧写到 TAP 设备,内核网络栈就会认为这是网卡收来的包
TAP在虚拟化里的作用
在 QEMU/KVM 中:
虚拟机的虚拟网卡(比如 e1000、virtio-net)连接到 TAP 设备。
当 Guest OS 发送一个以太网帧时 → QEMU 把它写入 TAP → TAP 交给内核网络栈 → 可以通过 bridge 转发到物理网卡,或者转给别的 VM。
当外部网络有数据进来 → 通过 bridge 转发到 TAP → QEMU 从 TAP 读出来 → 交给 Guest OS 的网卡设备。
所以 TAP 就是 虚拟机和宿主机网络世界的桥梁。
背景知识:QMP
QMP 是 QEMU 提供的一种 基于 JSON 的控制协议 (QEMU Monitor Protocol),运行在 管理平面。
用来 控制和管理虚拟机,比如:
启动/停止/挂起/恢复虚拟机
创建/删除快照
热插拔设备(CPU、内存、磁盘、网卡)
查询虚拟机状态(CPU 寄存器、内存使用、块设备 I/O)
交互方式:
用户(或者管理程序,比如 libvirt、OpenStack)通过 socket 连接 QEMU 的 QMP 接口
发送 JSON 命令,QEMU 返回 JSON 格式的结果
QMP 是管理接口(像命令行 API),用来控制虚拟机。
背景知识:VNC
VNC 是一种 远程桌面协议(图形界面访问协议),QEMU 可以内置一个 VNC 服务器。
用来 远程访问虚拟机的显示画面,就像你坐在虚拟机的显示器前一样。
可以看到 Guest OS 的图形界面(比如 BIOS 界面、Linux 桌面、Windows 桌面)
可以用鼠标、键盘在远程控制虚拟机
交互方式:
QEMU 作为 VNC Server
VNC Client(比如
vncviewer、TigerVNC、Remmina)连接上去传输的是像素/键盘/鼠标事件
例子:
xxxxxxxxxx# 启动一个 VM,启用 VNC 服务器在 :1 (5901端口)qemu-system-x86_64 -hda disk.img -vnc :1
# 然后用 VNC 客户端连接:vncviewer localhost:1可以把 VNC 理解为“QEMU 提供的远程显示/远程桌面接口”。用来操作虚拟机的屏幕和输入设备。
注册和处理
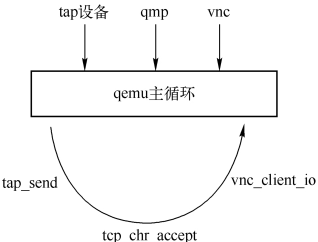
如图所示,QEMU在运行过程中会注册一些感兴趣的事件,设置其对应的处理函数
例如,对于VNC来说,会创建一个socket用于监听来自用户的连接,注册其可读事件为
vnc_client_io,当VNC有连接到来的时候,glib的框架就会调用vnc_client_io函数。
图中的例子是注册网卡设备的后端tap设备的收包。收到包后QEMU调用tap_send将包路由给虚拟机网卡前端,若虚拟机使用qmp,则在管理界面中当用户发送qmp命令过来之后,glib会调用事先注册的tcp_chr_accept来处理用户的qmp命令。
x
qemu-system-x86_64 -m 1024 -smp 4 -hda /home/test/test.img --enable-kvm -vnc :0这个命令是启动一个 QEMU 虚拟机 的完整示例,表示启动一个 64 位 QEMU 虚拟机,分配 1GB 内存、4 个 vCPU,硬盘镜像是 /home/test/test.img,使用 KVM 硬件加速,并且通过 VNC (5900端口) 输出显示画面。
再次强调事件循环的意义:
让所有关心的事件——无论是 I/O 事件还是定时器事件——都能被及时处理,不会被漏掉或无限等待。
QEMU的main函数早期版本定义在vl.c中,现在(qemu-10.0.3)定义在main.c中,在进行好所有初始化工作后会调用函数main_loop来开始主循环。
具体代码是这样的
x
int main(int argc, char **argv){ qemu_init(argc, argv); bql_unlock(); replay_mutex_unlock(); if (qemu_main) { // MacOS特殊情况 QemuThread main_loop_thread; qemu_thread_create(&main_loop_thread, "qemu_main", qemu_default_main, NULL, QEMU_THREAD_DETACHED); return qemu_main(); } else { qemu_default_main(NULL); // Linux/Windows 常见路径 g_assert_not_reached(); }}这里的这个qemu_init还是定义在vl.c当中的
qemu_default_main()中的qemu_main_loop在system.h中申明,在runstate.c中实现。
int qemu_main_loop(void){ int status = EXIT_SUCCESS;
while (!main_loop_should_exit(&status)) { main_loop_wait(false); }
return status;}然后这里的`main_loop_wait是实现在main_loop.c中
main_loop_wait
xxxxxxxxxxvoid main_loop_wait(int nonblocking){ // ......
timeout_ns = qemu_soonest_timeout(timeout_ns, timerlistgroup_deadline_ns( &main_loop_tlg));
ret = os_host_main_loop_wait(timeout_ns); // ......}QEMU主循环对应的三个函数如图所示,被上述代码中的os_host_main_loop_wait包含:
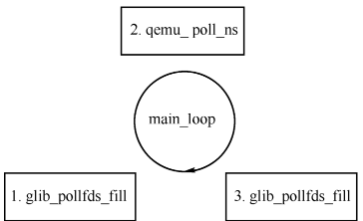
注: 此处第三步写错了,是
glib_pollfds_poll
x
static int os_host_main_loop_wait(int64_t timeout){ GMainContext *context = g_main_context_default(); int ret;
g_main_context_acquire(context);
glib_pollfds_fill(&timeout);
bql_unlock(); replay_mutex_unlock();
ret = qemu_poll_ns((GPollFD *)gpollfds->data, gpollfds->len, timeout);
replay_mutex_lock(); bql_lock();
glib_pollfds_poll();
g_main_context_release(context);
return ret;}这段代码也被定义在main-loop.c中。
main_loop_wait在调用os_host_main_loop_wait之前会调用qemu_soonest_timeout先计算一个最小timeout值,该值从定时器列表中获取的,表示监听事件的时候最多让主循环阻塞的时间。timeout使得QEMU能够及时处理系统中的定时器到期事件。
更通俗地描述:在 QEMU 里,主循环
main_loop_wait()负责处理两类事件(i) I/O事件 (ii)定时器事件(QEMU 设定的虚拟时钟/周期性任务,到达触发时间时需要执行)。为了避免 CPU 忙等 (轮询),QEMU 的主循环会调用一个阻塞函数
os_host_main_loop_wait(),通常基于ppoll() / select() / epoll(),让线程“睡眠”直到事件到来。但问题是:如果只靠 I/O 事件唤醒,定时器就可能错过触发时间。所以 QEMU 需要一个 超时机制 (timeout) 来保证按时处理定时器。
所谓 定时器到期事件,就是某个定时器设定的时间到了,需要执行对应的回调函数。举几个在 QEMU 里的例子:
虚拟时钟 (vm_clock):模拟 CPU 指令执行的时钟,定期触发事件来同步 vCPU 与外设。
周期性任务:比如刷新虚拟机状态、统计性能数据、触发 watchdog、刷新屏幕(VNC/SDL)。
设备模拟定时器:模拟硬件设备的定时器(如网卡需要周期性发送中断、磁盘控制器定时刷新缓存)。
当某个定时器的到期时间 <= 当前虚拟时钟,就会触发“定时器到期事件”,执行对应的 handler。
timeout 的作用 = 限制主循环最多阻塞多久,以便 QEMU 能够及时处理这些定时器事件。
QEMU主循环的一个函数是glib_pollfds_fill (定义在main-loop.c中)。
主要工作:获取所有需要进行监听的fd,并且计算一个最小的超时时间
glib 主循环管理了很多 事件源 (GSource);
每个事件源可能关心一个或多个 文件描述符 (GPollFD);
glib_pollfds_fill()会遍历这些事件源,把 fd 都汇总到一个统一的数组中。
x
static void glib_pollfds_fill(int64_t *cur_timeout){ // 获取默认上下文: glib 的事件循环基于 GMainContext,它管理了所有事件源 (GSource) // 这里拿到默认上下文(QEMU 一般就用默认的) GMainContext *context = g_main_context_default(); int timeout = 0; int64_t timeout_ns; int n; // 预处理(准备阶段):通知 glib “我要开始收集 pollfd 了”。 // max_priority 会返回当前最高优先级事件,用于后续筛选事件。 g_main_context_prepare(context, &max_priority);
// 分配 GPollFD 数组 glib_pollfds_idx = gpollfds->len; n = glib_n_poll_fds; do { GPollFD *pfds; glib_n_poll_fds = n; g_array_set_size(gpollfds, glib_pollfds_idx + glib_n_poll_fds); pfds = &g_array_index(gpollfds, GPollFD, glib_pollfds_idx); n = g_main_context_query(context, max_priority, &timeout, pfds, glib_n_poll_fds); } while (n != glib_n_poll_fds); // 处理超时时间 if (timeout < 0) { timeout_ns = -1; } else { timeout_ns = (int64_t)timeout * (int64_t)SCALE_MS; } // 融合 QEMU 自己的定时器 *cur_timeout = qemu_soonest_timeout(timeout_ns, *cur_timeout);}分配 GPollFD 数组
这段循环在干两件事:
分配存放 pollfd 的数组
gpollfds是一个GArray,用来装所有GPollFD(文件描述符 + 关注事件)。glib_pollfds_idx记录当前数组位置。g_array_set_size()动态调整大小,保证能放下所有 fd。关于pollfd,linux代码如下
xxxxxxxxxxstruct pollfd {int fd; // 文件描述符,比如 socket、pipe、字符设备short events; // 关注的事件类型,比如可读、可写、异常short revents; // 实际发生的事件,由 poll() 填写};用于 多路复用 I/O:如果有多个 socket、文件、管道,你不想每个都单独阻塞读/写;就把它们都放到一个
pollfd数组里。系统会:
阻塞或等待,直到某个 fd 的事件发生或超时;
返回后,每个
pollfd.revents告诉你哪些 fd 就绪,可以安全操作。
调用
g_main_context_query()这是 glib 的关键函数:它会把当前上下文里所有
GSource的 pollfd 复制到pfds数组。同时返回一个
timeout,表示“glib 事件源中最近要触发的定时器的超时时间(毫秒)”。Q? 为什么有 while 循环?
因为我们一开始可能不知道需要多少个 pollfd。
g_main_context_query()会告诉你“实际需要 n 个”。如果
n != glib_n_poll_fds,就重新分配,再跑一次,直到数组够大。
处理超时时间
timeout是 glib 给出的定时器到期时间(单位 ms)。转换成纳秒
timeout_ns。如果
timeout < 0,说明 glib 没有定时器要处理,设成-1(即 poll 可以无限阻塞)。
融合 QEMU 自己的定时器
QEMU 除了 glib 的定时器,还有自己维护的 虚拟机定时器(虚拟时钟、周期任务、设备定时器)。
qemu_soonest_timeout()会取:min(glib_timeout, qemu_timeout, 传入的cur_timeout)这样最终的
cur_timeout就是 最早要触发的定时器时间(最大主循环阻塞时间)。这个值会传给
poll(),确保事件循环不会阻塞太久,能按时醒来处理定时器。
此时就完成了上图的第一步,已经有了所有需要监听的fd了,然后会调用qemu_mutex_unlock_iothread释放QEMU大锁(Big QEMU Lock, BQL)。关于BQL将在下一节中介绍。
接着,os_host_main_loop_wait函数会调用qemu_poll_ns
xxxxxxxxxxret = qemu_poll_ns((GPollFD *)gpollfds->data, gpollfds->len, timeout);该函数在timer.h中声明,在qemu-timer.c中实现
x
int qemu_poll_ns(GPollFD *fds, guint nfds, int64_t timeout){ if (timeout < 0) { return ppoll((struct pollfd *)fds, nfds, NULL, NULL); } else { struct timespec ts; int64_t tvsec = timeout / 1000000000LL; /* Avoid possibly overflowing and specifying a negative number of * seconds, which would turn a very long timeout into a busy-wait. */ if (tvsec > (int64_t)INT32_MAX) { tvsec = INT32_MAX; } ts.tv_sec = tvsec; ts.tv_nsec = timeout % 1000000000LL; return ppoll((struct pollfd *)fds, nfds, &ts, NULL); } return g_poll(fds, nfds, qemu_timeout_ns_to_ms(timeout));}它接收三个参数
fds:文件描述符数组(GPollFD,glib 封装的 pollfd)
nfds:数组长度timeout:等待时间,纳秒级,可以是负数(表示无限阻塞)
判断是否使用 ppoll
xxxxxxxxxx如果系统支持
ppoll()(Linux/现代 Unix)就使用它;否则 fallback 到 glib 的
g_poll()(glib 封装的 poll,单位是毫秒)。
qemu_poll_ns的调用会阻塞主线程,当该函数返回之后
要么表示有文件fd上发生了事件
要么表示有一个超时
不管怎么样,这都将进入图中的第三步,也就是调用glib_pollfds_poll进行事件的分发处理
该函数实现于main-loop.c中
xxxxxxxxxxstatic void glib_pollfds_poll(void){ GMainContext *context = g_main_context_default(); GPollFD *pfds = &g_array_index(gpollfds, GPollFD, glib_pollfds_idx);
if (g_main_context_check(context, max_priority, pfds, glib_n_poll_fds)) { g_main_context_dispatch(context); }}该函数调用了glib框架中的g_main_context_check检测事件,然后调用g_main_context_dispatch进行了事件的分发。
QEMU主循环真正的循环
上面的main_loop_wait其实只执行了一次,真正的循环发生在qemu_main_loop里。也即是之前提到的在runstate.c中提到的代码。返回值是程序退出状态(EXIT_SUCCESS 或其他)
xxxxxxxxxxint qemu_main_loop(void){ int status = EXIT_SUCCESS;
while (!main_loop_should_exit(&status)) { main_loop_wait(false); }
return status;}main_loop_should_exit(&status):判断 QEMU 是否需要退出例如收到
Ctrl+C、虚拟机关闭、崩溃等如果不退出,返回
false,循环继续
main_loop_wait(false):一次事件迭代填充 fd 数组(I/O + 定时器)
计算超时
阻塞等待事件(
os_host_main_loop_wait())处理就绪事件和定时器
循环效果
每次循环都会重新收集 新的事件源(新注册的 I/O 或定时器)
只要事件循环没有退出条件,主循环会 无限调用
main_loop_wait()因此:
新的 I/O 事件会被下一轮循环捕获并处理
定时器事件会在到期时被触发
xxxxxxxxxx+-----------------------+| qemu_main_loop() || while (!exit) || || main_loop_wait() |-----> 收集 fd + timeout| |-----> 阻塞等待 I/O / timeout| |-----> 触发回调+-----------------------+循环直到退出条件满足